|
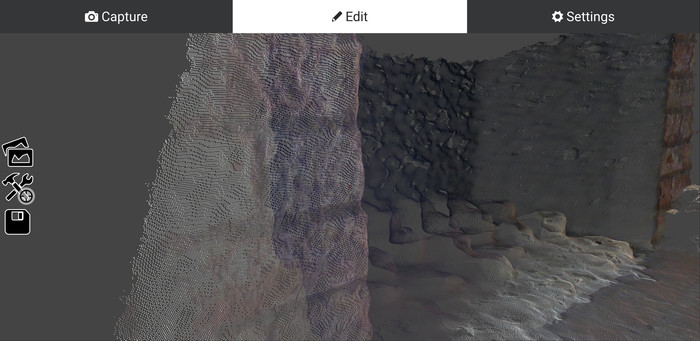
Сообщество State of the Art представило новую версию Handy 3D Scanner 0.5.1 и опубликовало исходные тексты проекта на GitHub. Проект развивает портативный интерфейс для трёхмерного сканирования объектов и местности, применяя доступные стерео-камеры Intel RealSense D400. Код написан на языке С++ (интерфейс на Qt5) и распространяется под лицензией Apache 2.0. Поддерживается Linux и Android.
Программа обладает достаточной функциональностью, чтобы собрать сравнительно дешёвый (~$140) программно-аппаратный комплекс для решения задач детального переноса объектов из реального мира в виртуальный. Проект уже готов для повседневного использования при подготовке детальных моделей для решения таких задач, как сканирование для последующей 3D-печати, создание аватаров, подготовка 3D-моделей на основе реальных объектов, проведение измерений и оценка пропорций.
Особенности Handy 3D Scanner:
- Кросс-платформенность (Qt5) и работа на различных Android устройствах (поддерживается Android 5.1 и выше);
- Захват множества снимков (облаков точек) в разрешении ~1MPix;
- Позиционирование на местности при помощи ARCore (основной камеры телефона);
- Предпросмотр захваченных снимков как облаков точек или сгенерированных поверхностей;
- Сохранение и загрузка снимков для дальнейшей обработки в формате PCD;
- Экспорт сцены в формат glTF 2.0 с поддержкой сжатия;
- Открытая модель разработки и исходный код свободно доступный на GitHub.
|